
Meu Primeiro Caso Anatem¶
Sumário
A representação do sistema clássico Máquina X Barra Infinita, ilustrado na Fig. 5, será detalhada no Anatem. Este sistema consiste de um gerador injetando potência através de uma linha de transmissão em um sistema representado por uma barra infinita. Um sistema muito forte pode ser representado por barra infinita, ou seja, uma fonte com magnitude de tensão e frequência constantes.
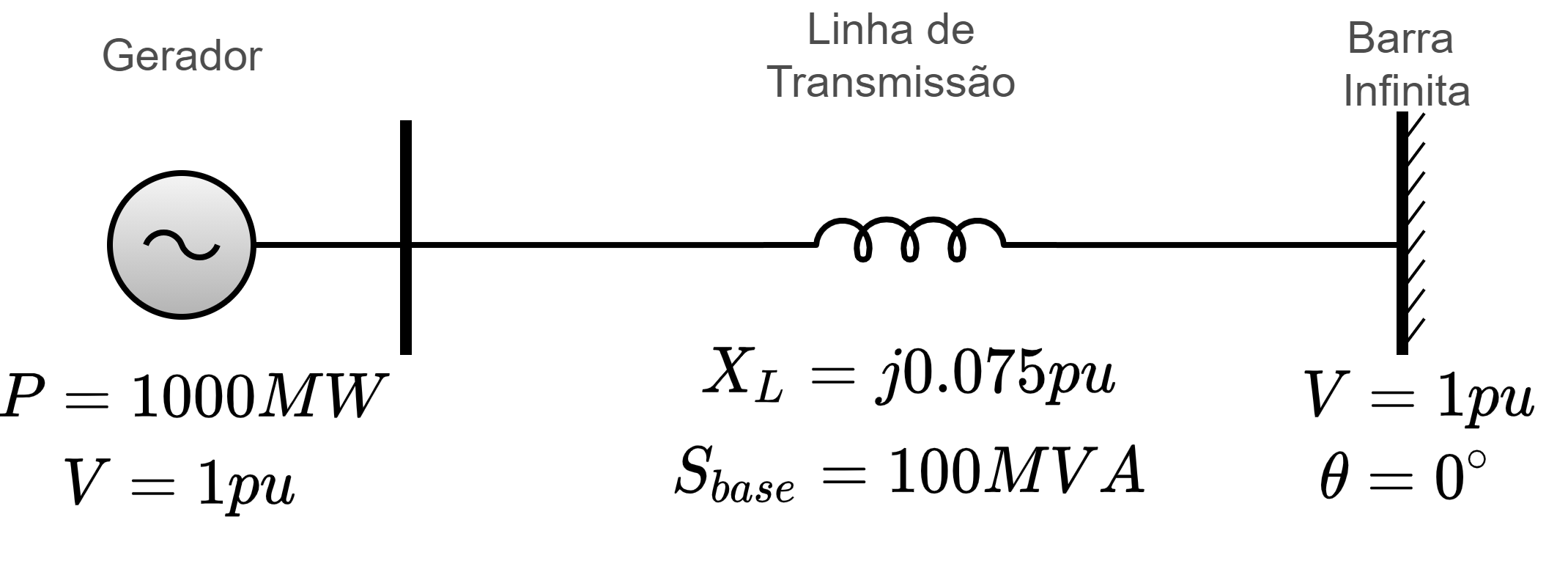
Fig. 5 Caso máquina X barra infinita¶
Representação do Sistema “Máquina x Barra Infinita” no Anarede¶
A modelagem do sistema Máquina X Barra Infinita no programa Anarede é ilustrada a seguir:
1(======================================================================= 2( TITULO DO CASO 3(======================================================================= 4TITU 5Maquina x Barra infinita: X = 7.5 % 6( 7(======================================================================= 8( DADOS DE CONSTANTES DE CONTROLE EXECUCAO 9(======================================================================= 10DCTE 11(Mn) ( Val) (Mn) ( Val) (Mn) ( Val) (Mn) ( Val) (Mn) ( Val) (Mn) ( Val) 12TEPA 1E-4 TEPR 1E-4 1399999 14( 15(======================================================================= 16( DADOS DE BARRA CA 17(======================================================================= 18DBAR 19(No )OETGb( nome )Gl( V)( A)( Pg)( Qg)( Qn)( Qm)(Bc )( Pl)( Ql)( Sh)Are(Vf) 20 1 1 Maq1000MW 1000 1000. -999999999 001 21 2 2 Barra Inf. 1000 0. -999999999 001 2299999 23( 24(======================================================================= 25( DADOS DE CIRCUITOS CA 26(======================================================================= 27DLIN 28(De )d O d(Pa )NcEP ( R% )( X% )(Mvar)(Tap)(Tmn)(Tmx)(Phs)(Bc )(Cn)(Ce)Ns 29 1 2 1 7.5 3099999 31( 32(======================================================================= 33( EXECUCAO DO CASO 34(======================================================================= 35EXLF NEWT 36( 37FIM
A título de exemplo, um arquivo texto com os comandos acima pode ser salvo com o nome “MBINF.PWF”.
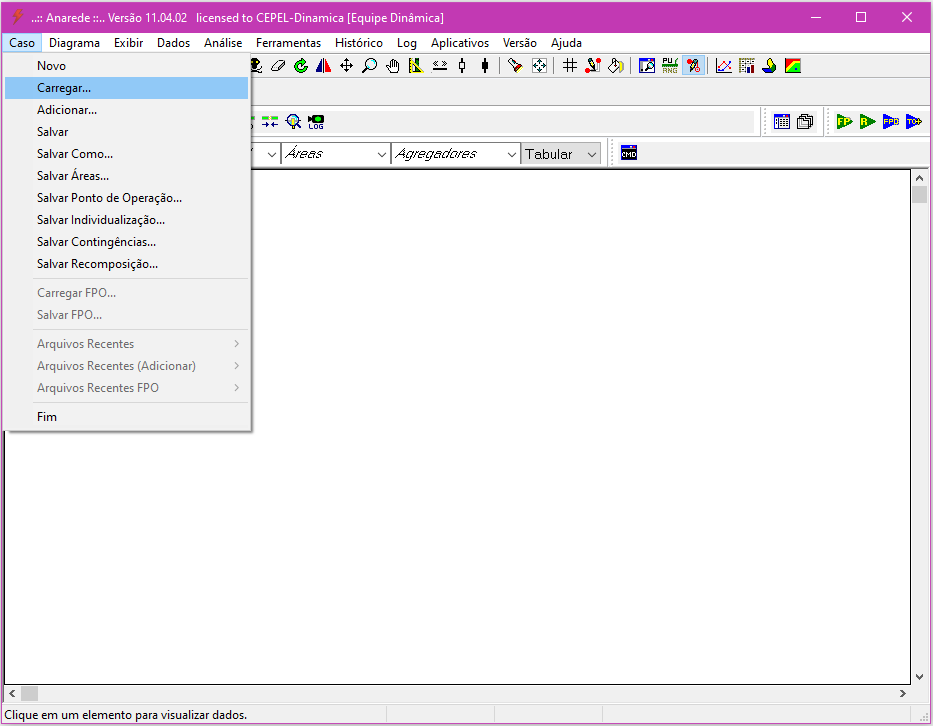
Carregar o caso de fluxo de potência no Anarede
O arquivo “MBINF.PWF” deve ser carregado no programa Anarede, conforme a seguir:
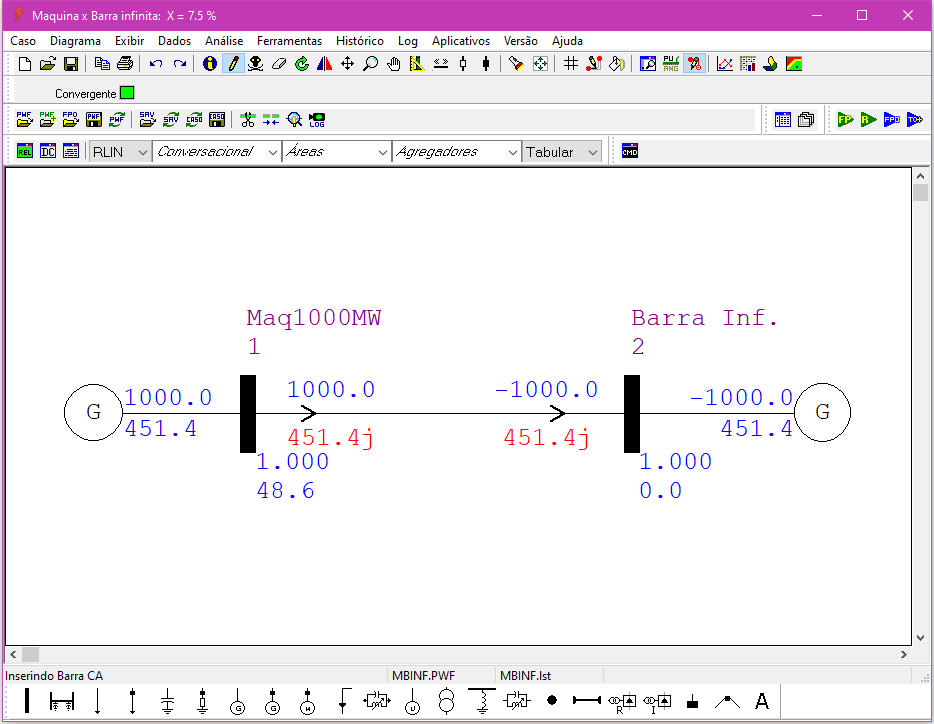
Se no mesmo diretório do arquivo “MBINF.PWF”, houver um arquivo de diagrama com o mesmo nome (por exemplo: “MBINF.LST”), o diagrama do sistema será carregado automaticamente, conforme ilustra a figura abaixo. Do contrário, o usuário poderá desenhar o diagrama usando as ferramentas gráficas para criação de diagrama unifilar.
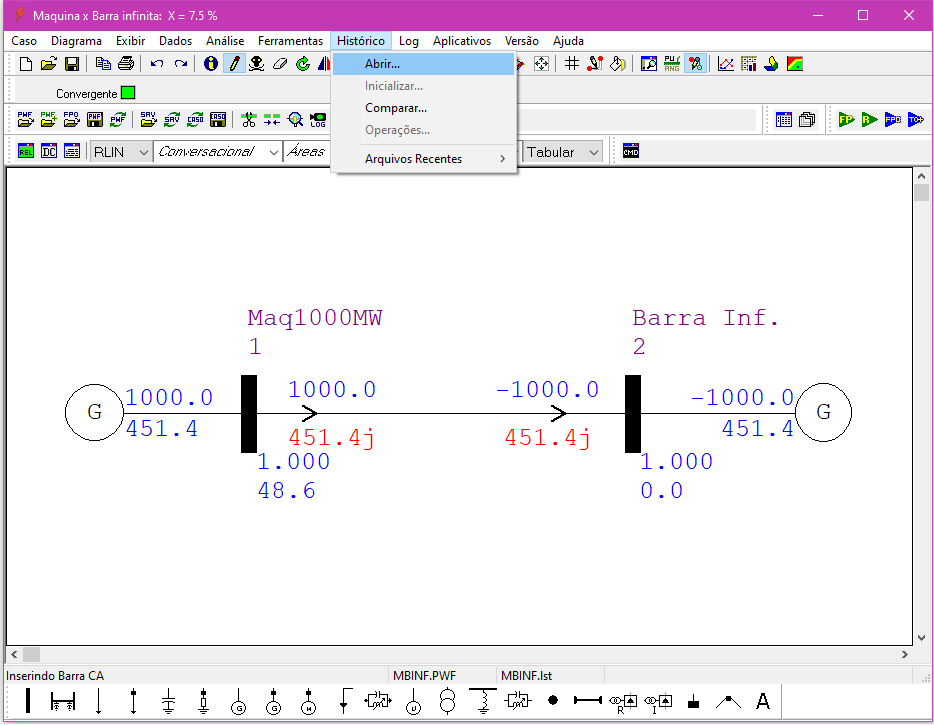
Salvar o caso convergido em arquivo histórico
O caso convergido deverá ser salvo em arquivo histórico (extensão *.SAV) por meio do menu “Histórico>Abrir…”. Se o usuário desejar salvar o caso convergido em um arquivo SAV existente, basta escolher o arquivo desejado no seu diretório de origem. Para salvar o caso em um novo arquivo histórico, basta definir o nome do novo arquivo SAV e, ao clicar em “Abrir”, o Anarede criará um novo arquivo savecase com o nome definido pelo usuário (neste exemplo, usaremos: “MBINF.SAV”).
Na sequência, por meio do menu “Histórico>Operações…”, o usuário deverá salvar o caso convergido no arquivo histórico recém aberto, conforme a seguir:
Neste ponto, há possibilidade de alterar o título do caso:
A partir do sistema “máquina x barra infinita” convergido e salvo em arquivo binário (“MBINF.SAV”), começaremos a preparar este caso no programa Anatem.
Representação do Sistema “Máquina x Barra Infinita” no Anatem¶
Os parâmetros da máquina síncrona deste caso exemplo são listados na Fig. 6.

Fig. 6 Dados dinâmicos do caso máquina X barra infinita¶
A tabela abaixo apresenta os 3 modelos de máquina síncrona do Anatem, cada um destes modelos é habilitado através do uso das respectivas Opções de Execução em conjunto com o código DMDG, onde são descritos os Dados de Modelos Predefinidos de Máquina Síncrona.
Opção de Execução |
Descrição do Modelo |
|---|---|
Modelo clássico de máquina síncrona ou barra infinita |
|
Máquina síncrona de pólos salientes |
|
Máquina síncrona de rotor liso |
Aplicação dos Principais Códigos de Execução do Anatem¶
Definição do título do caso
O título do caso a ser simulado deve ser especificado por meio do código TITU, conforme o exemplo a seguir:
1(=============================================================================== 2( TÍTULO DO CASO 3(=============================================================================== 4TITU 5Caso Exemplo - Máquina versus Barra Infinita
Associação de arquivos
O arquivo histórico do Anarede deve ser associação e restabelecido por meio do código DARQ, conforme o exemplo a seguir. Neste código também devem ser solicitados os arquivos de saída.
1(=============================================================================== 2( ASSOCIACAO DE ARQUIVOS 3(=============================================================================== 4DARQ 5(............................. Arquivos de Saída ............................... 6(Tipo) (C) ( Nome do Arquivo 7OUT .\OUT\ 8LOG .\LOG\ 9PLT .\PLT\ 10(............................. Arquivo Histórico ............................... 11(Tipo) (C) ( Nome do Arquivo 12HIS 1 MBINF.SAV 13(............................................................................... 14999999
Definição de opções padronizadas para a execução
A aplicação de Opções de Execução a todos os Códigos de Execução informados na sequência é realizada por meio do código DOPC. O exemplo abaixo ilustra a solicitação de impressão de dados de entrada no relatório de saída (via opção IMPR).
1(=============================================================================== 2( DADOS DE PADRAO PARA OPCOES DE EXECUCAO 3(=============================================================================== 4DOPC 5(Op) E (Op) E (Op) E (Op) E (Op) E (Op) E (Op) E (Op) E (Op) E (Op) E') 6IMPR L 7999999
Definição de modelos de máquina síncrona
Neste caso exemplo, a barra infinita é representada pelo código/opção DMDG MD01 e o modelo de máquina do gerador da barra 1 é fornecido através do código/opção DMDG MD02.
Modelagem do sistema no programa Anarede:
Barra Infinita: modelada por uma barra de referência (barra \(V\theta\))
Gerador: modelado por uma barra de geração (barra \(PV\))
Modelagem do sistema no programa Anatem:
O preenchimento dos campos nestes códigos é ilustrada a seguir:
1(=============================================================================== 2( MODELOS DE GERADOR TIPO BARRA INFINITA 3(=============================================================================== 4DMDG MD01 5(No) (L'd)(Ra )( H )( D )(MVA)Fr C 6 11 7999999 8( 9(=============================================================================== 10( MODELOS DE GERADOR COM POLOS SALIENTES 11(=============================================================================== 12DMDG MD02 13(No) O (CS) (Ld )(Lq )(L'd) (L"d)(Ll )(T'd) (T"d)(T"q) 14 22 22 113.8 68.1 35. 28.8 15.8 5.6 0.08 0.15 15(No) (Ra )( H )( D )(MVA)Fr C 16 22 4.938 184. 17999999
Definição de modelo de curva de saturação
A curva de saturação da máquina síncrona é definida no código DCST. A associação da curva de saturação ao modelo de máquina síncrona é realizada no código DMDG.
1(=============================================================================== 2( CURVAS DE SATURACAO 3(=============================================================================== 4DCST 5( Curvas de Saturacao de Geradores 6(Nc) T ( P1 ) ( P2 ) ( P3 ) 7 22 2 0.013 7.920 0.8 8999999
Associação de modelos de máquina e controladores
O modelo de máquina síncrona e barra infinita criados no DMDG deverão ser associados às barras de geração do caso de fluxo de potência por meio do código DMAQ, conforme o exemplo seguir:
1(=============================================================================== 2( ASSOCIACAO DE MAQUINAS COM MODELOS 3(=============================================================================== 4DMAQ 5( Nb) Gr (P) (Q) Und ( Mg ) ( Mt )u( Mv )u( Me )u(Xvd)(Nbc) 6 1 10 6 22 7 2 10 11 8999999
Eventos de simulação
Os eventos de simulação são especificados no código DEVT, por meio do preenchimento dos parâmetros relativos ao tipo de evento, instante de aplicação e elemento sob falta. Alguns exemplos de preenchimento da régua de eventos são ilustrados a seguir:
1(=============================================================================== 2( EVENTOS 3(=============================================================================== 4DEVT 5( 6( Aplicacao e remocao de curto franco na barra 1 7(Tp) ( Tempo)( El )( Pa)Nc( Ex) ( % ) (ABS ) Gr Und (Bl)P ( Rc ) ( Xc ) ( Bc ) (Defas) 8APCB 1.000 1 9RMCB 1.050 1 10( 11( Aplicacao de curto na barra 1 com reatancia 12(Tp) ( Tempo)( El )( Pa)Nc( Ex) ( % ) (ABS ) Gr Und (Bl)P ( Rc ) ( Xc ) ( Bc ) (Defas) 13(mdsh 1.0 1 -50. 14( 15999999
Definição de variáveis de plotagem
A especificação de variáveis de plotagem é realizada no código DPLT. Cada equipamento possui um conjunto de variáveis de interesse que podem ser observadas ao longo da simulação dinâmica. Alguns exemplos de solicitação de variáveis de máquina síncrona e de barra CA são ilustrados a seguir:
1(=============================================================================== 2( VARIAVEIS DE SAIDA 3(=============================================================================== 4DPLT 5(Tipo)M( El ) ( Pa) Nc Gp ( Br) Gr ( Ex) (Bl) P 6DELT 1 10 7FMAQ 1 10 8PELE 1 10 9QELE 1 10 10VOLT 1 11999999
Especificação de parâmetros de simulação
Os parâmetros de simulação (tempo máximo de simulação, passo de integração, frequência de plotagem) são definidos no código DSIM.
1(=============================================================================== 2( DADOS DE SIMULACAO 3(=============================================================================== 4DSIM 5( Tmax ) (Stp) ( P ) ( I ) ( F ) 6 2.0 .001 11
Execução da simulação
A execução da simulação dinâmica é iniciada quando o código EXSI é lido pelo Anatem. A partir desse ponto, a simulação é executada até o tempo máximo de simulação especificado no último código DSIM fornecido. O fim da leitura de dados do Anatem é indicado pelo código FIM, após esse comando, quaisquer dados fornecidos serão ignorados pelo Anatem.
1(=============================================================================== 2( EXECUCAO DO CASO 3(=============================================================================== 4EXSI 5( 6FIM
Caso Máquina x Barra Infinita¶
A princípio, será considerado o caso simples em que somente o modelo do gerador síncrono e da barra infinita são considerados.
A simulação de um curto-circuito franco na barra terminal do gerador síncrono com duração de 50 ms é realizada a partir dos seguintes comandos no DEVT:
1DEVT 2( Aplicacao e remocao de curto franco na barra 1 3(Tp) ( Tempo)( El )( Pa)Nc( Ex) ( % ) (ABS ) Gr Und 4APCB 1.000 1 5RMCB 1.050 1 6999999
Os resultados desta simulação são ilustrados na Fig. 7
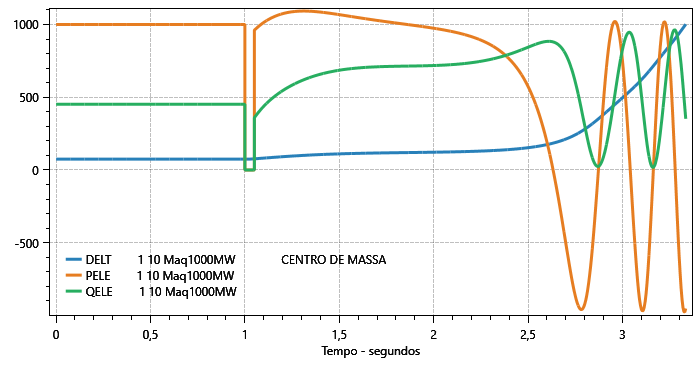
Fig. 7 Caso máquina x barra infinita sem reguladores¶
Caso Máquina x Barra Infinita + Regulador de Tensão¶
Definição de modelo de regulador de tensão
Neste exemplo, um regulador de tensão simplificado é representado no formato CDU.
1(=============================================================================== 2( CONTROLADORES DEFINIDOS PELO USUARIO 3(=============================================================================== 4DCDU 5( 6( Regulador de Tensao de 1a. ordem 7(ncdu) ( nome cdu ) 8 0001 AVR 9(nb) (tipo) (stip)s(vent) (vsai) ( p1 )( p2 )( p3 )( p4 ) (vmin) (vmax) 10 01 ENTRAD Vref 11 02 IMPORT VOLT Vt 12 03 IMPORT VSAD Vsad 13 04 SOMA Vref X3 14 -Vt X3 15 Vsad X3 16(nb)i(tipo) (stip)s(vent) (vsai) ( p1 )( p2 )( p3 )( p4 ) (vmin) (vmax) 17 05 LEDLAG X3 Efd 100.0 0.0 1.0 0.05 Lmin Lmax 18 06 EXPORT EFD Efd 19( 20(---------------------------------------------------------------------- 21(DEFVA (stip) (vdef) ( d1 ) 22(---------------------------------------------------------------------- 23DEFVAL Lmin -7. 24DEFVAL Lmax 7. 25FIMCDU 26( 27999999
Associação de modelos de máquina e controladores
O modelo de máquina síncrona + regulador de tensão deverão ser associados à barra de geração do caso de fluxo de potência por meio do código DMAQ, conforme o exemplo seguir:
1(=============================================================================== 2( ASSOCIACAO DE MAQUINAS COM MODELOS 3(=============================================================================== 4DMAQ 5( Nb) Gr (P) (Q) Und ( Mg ) ( Mt )u( Mv )u( Me )u(Xvd)(Nbc) 6 1 10 6 22 1u 7 2 10 11 8999999
Neste caso, também é realizada a simulação de um curto-circuito franco na barra terminal do gerador síncrono com duração de 50 ms. Os resultados desta simulação são ilustrados na Fig. 8
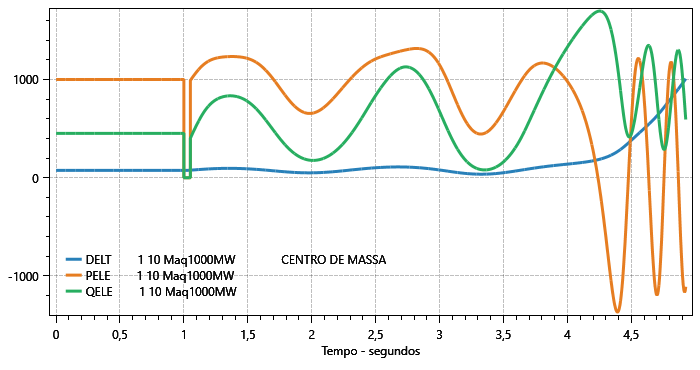
Fig. 8 Caso máquina X barra infinita com regulador de tensão¶
Caso Máquina x Barra Infinita + Regulador de Tensão + Estabilizador¶
Definição de modelo de estabilizador
Neste exemplo, um modelo de estabilizador é representado no formato CDU.
1DCDU 2(---------------------------------------------------------------------- 3(ncdu) ( nome cdu ) 4 0002 PSS 5(---------------------------------------------------------------------- 6( 7(---------------------------------------------------------------------- 8(EFPAR (npar) ( valpar ) 9(---------------------------------------------------------------------- 10DEFPAR #L1 -0.3 11DEFPAR #L2 0.3 12DEFPAR #K 20. 13DEFPAR #Tw 3.0 14DEFPAR #T1 0.08 15DEFPAR #T2 0.01 16( 17(---------------------------------------------------------------------- 18(nb) (tipo) (stip)s(vent) (vsai) ( p1 )( p2 )( p3 )( p4 ) (vmin) (vmax) 19(---------------------------------------------------------------------- 200001 IMPORT WMAQ WMAQ 210002 GANHO WMAQ X2 #K 220003 WSHOUT X2 X3 #Tw 1.0#Tw 230004 LEDLAG X3 X4 1.0#T1 1.0#T2 240005 LIMITA X4 VSAD L1 L2 250006 EXPORT VSAD VSAD 26( 27(---------------------------------------------------------------------- 28(DEFVA (stip) (vdef) ( d1 ) 29(---------------------------------------------------------------------- 30DEFVAL L1 #L1 31DEFVAL L2 #L2 32( 33FIMCDU 34( 35999999
Associação de modelos de máquina e controladores
O modelo de máquina síncrona + regulador de tensão + estabilizar deverão ser associados à barra de geração do caso de fluxo de potência por meio do código DMAQ, conforme o exemplo seguir:
1(=============================================================================== 2( ASSOCIACAO DE MAQUINAS COM MODELOS 3(=============================================================================== 4DMAQ 5( Nb) Gr (P) (Q) Und ( Mg ) ( Mt )u( Mv )u( Me )u(Xvd)(Nbc) 6 1 10 6 22 1u 2u 7 2 10 11 8999999
Neste caso, também é realizada a simulação de um curto-circuito franco na barra terminal do gerador síncrono com duração de 50 ms. Os resultados desta simulação são ilustrados na Fig. 9
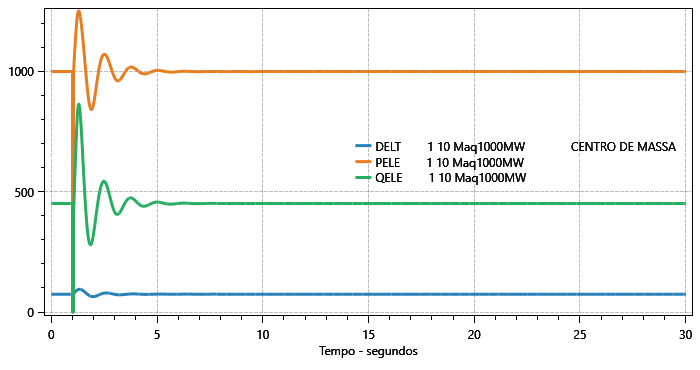
Fig. 9 Caso máquina x barra infinita com AVR e estabilizador¶