Bloco LAGNL¶
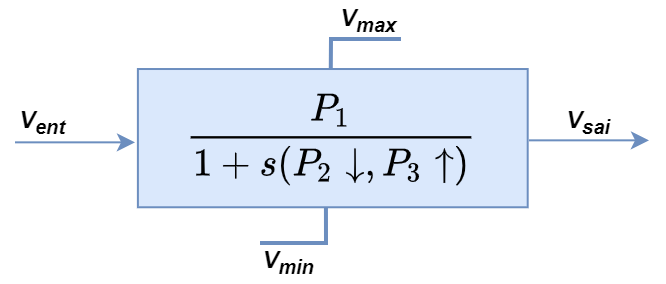
O bloco LAGNL é um controlador do tipo atraso, não linear, em que o termo de primeira ordem do denominador depende do sentido de variação da entrada.
Características¶
# Entradas |
1 |
Sinal de Entrada |
Real |
Sinal de Saída |
Real |
P1 |
Ganho da função de transferência; obrigatório |
P2 |
Termo de primeira ordem do denominador, derivada de entrada negativa; obrigatório |
P3 |
Termo de primeira ordem do denominador, derivada de entrada positiva; obrigatório |
Vmin |
Valor limite mínimo para a variável de estado |
Vmax |
Valor limite máximo para a variável de estado |
Valores default |
|
Restrições |
\(P_1\ne0\), \(P_2\ne0\), \(P_3\ne0\) |
Lógica¶
Sendo \(V_{sai}(s) = \frac{P_1}{1 + sT} V_{ent} (s)\)
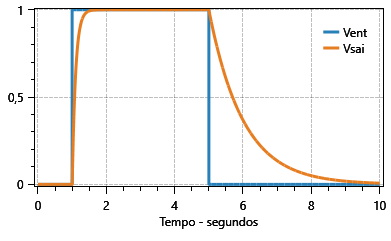
Se \(\frac{dV_{ent}}{dt} < 0\), então \(T = P_2\)
Se \(\frac{dV_{ent}}{dt} > 0\), então \(T = P_3\)
Se \(\frac{dV_{ent}}{dt} = 0\), então \(T = T(t - \Delta t)\)
Se \(V_{sai}(t) < V_{min}\), então \(V_{sai}(t) = V_{min}\)
Se \(V_{sai}(t) > V_{max}\), então \(V_{sai}(t) = V_{max}\)