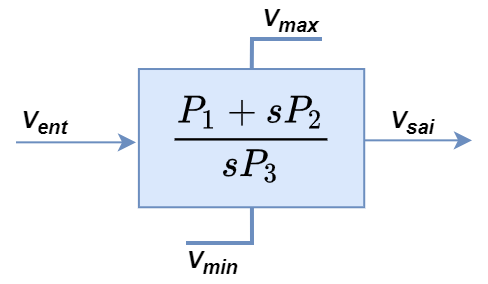
Bloco PROINT¶
O bloco PROINT é utilizado para a construção de malhas de controle como um controlador do tipo proporcional-integral.
Características¶
# Entradas |
1 |
Sinal de Entrada |
Real |
Sinal de Saída |
Real |
P1 |
Ganho da função de transferência; obrigatório |
P2 |
Termo independente do denominador |
P3 |
Termo de primeira ordem do denominador; obrigatório |
Vmin |
Valor limite mínimo para a variável de estado do bloco |
Vmax |
Valor limite máximo para a variável de estado do bloco |
Valores default |
\(P_2=0\) |
Restrições |
\(P_1\ne0\), \(P_3\ne0\) |
Lógica¶
\(Y(s) = \frac{P_1}{P_3} \frac{1}{s} V_{ent}(s)\)
Com \(V_{sai}(t) = \frac{P_2}{P_3} V_{ent}(t) + Y(t)\)
Se \(Y(t) < V_{min}\), então \(Y(t) = V_{min}\)
Se \(Y(t) > V_{max}\), então \(Y(t) = V_{max}\)
Exemplo¶
1DCDU
2(ncdu) ( nome cdu )
3 01 CDU_PROINT
4(nb)i(tipo)o(stip)s(vent) (vsai) ( p1 )( p2 )( p3 )( p4 ) (vmin) (vmax)
5 10 PROINT Vent Vsai 2.0 0.6 1.8 vmin vmax
6FIMCDU
7(
8999999
Dica
Utilize o Bloco ORD(1) para a modelagem de funções de transferência de primeira ordem mais genéricas.